|
 |
 |
|
|
 |
 |
|
|
 |
 |
|
|
 |
 |
|
|
 |
Pete's Robo-Page
Here are some of the Robots I've built, and what I learned from each of them. All of this stuff I learned from someone else publishing info on the Web, and so I'll do the same, so others can learn what I've learned from others. Standing on shoulders and all that.
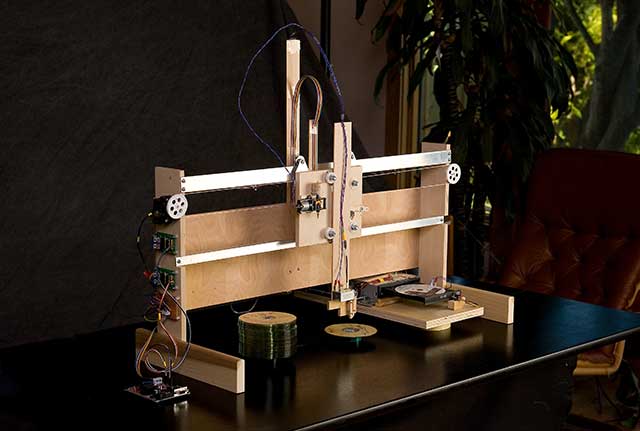
I saw a couple of these on the web, and decided to build one for my-self.
Auto copies CDs into iTunes.
R/C Hamster Ball
(great way to chase the cat)Test platform for Burning Man Project.
Combine basic functional elements into structured system.
This was a test bed for the Airplane UAV system.
The truck uses GPS to Navigate between preset way-points. (using latitude and longitude)
Used the GPS system from the R/C GPS Truck project.
Designed a 2-way ground station for trimming and telemetry.
Uses Infa-Red horizon sensors to level the aircraft.
This used a lot of info from the Balancing Robot project.
Uses Gyros and Inertial sensors to stabilize the aircraft.
I saw an article about Kalman filters, and threw this together in about 4 hours. Didn't like the way the KF worked, so I threw it out and wrote my own drift compensator. Works good.
Uses PIC16F876 mpu with PicBasicPro & asm, external Floating Point processor, and 5DOF IMU from Spark Fun. (2-Gyros, 3 Accelerometers)
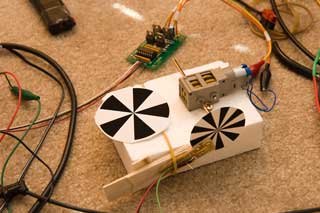
To make any robo-go, you need to control the motors. Either using R/C servos, or an H-Bridge & Electronic Speed Control. To tell how fast you're going, you need wheel encoders.
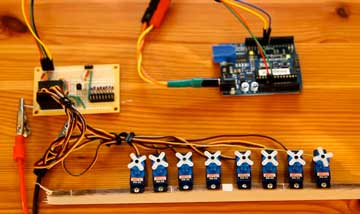
Drive up to 10 servos with only 2 Arduino Pins
Need to drive a lot of servos? Here's how.
Working with Aptos High School Students for international competition. Required designing and building an underwater vehicle that performed specified tasks, and the guidance and control system to operate it.